Corr / Corr2D / Detector / Detector2D¶
Corr cross-correlates a reference against a stream of CF32 frames and
coherently accumulates over dwell frames before dumping — trading
latency for SNR gain. Detector wraps Corr and applies a CFAR
threshold; Corr2D / Detector2D extend both to 2-D template matching.
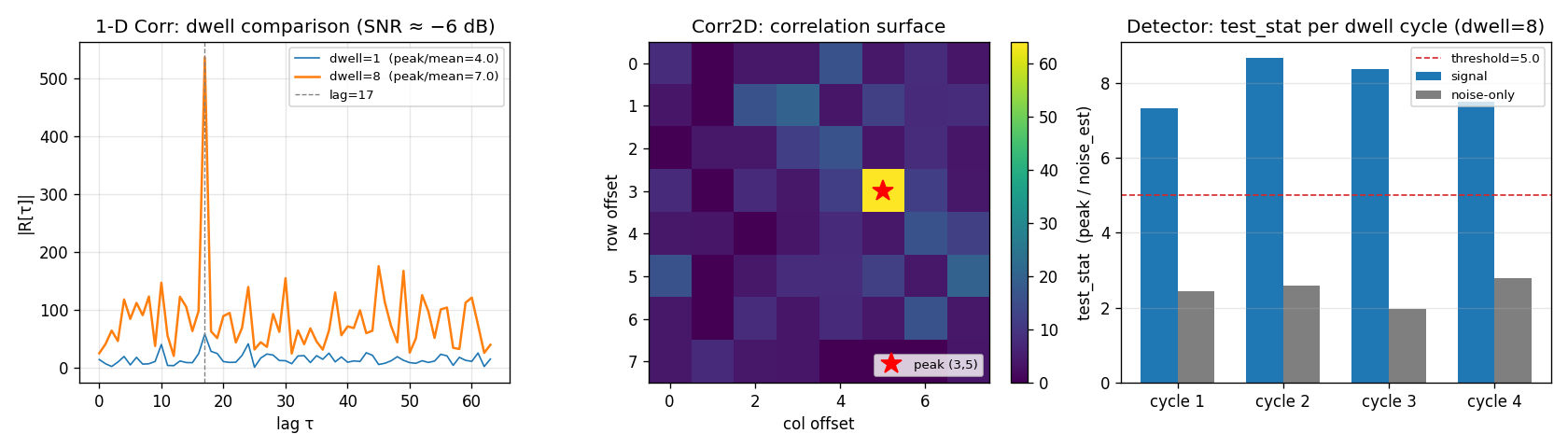
The figure below shows all four classes in one run against a BPSK PN reference at SNR ≈ −6 dB:
- Left — 8 coherent integrations push peak/mean from 4.0 → 7.0, pulling the lag-17 peak cleanly out of the noise floor.
- Centre —
Corr2Dfinds the (row=3, col=5) shift of a 2-D template in a single call. - Right —
Detector.push()emits one test-stat per dwell; signal cycles sit well above the threshold=5 gate while noise-only cycles stay below.
Corr — coherent integrate-and-dump¶
execute() accumulates frames and returns output on the dwell-th call;
all other calls return None. Use as a context manager to ensure cleanup:
from doppler.spectral import Corr
import numpy as np
rng = np.random.default_rng(42)
N, LAG, DWELL = 64, 17, 8
SNR = 10 ** (-6 / 20) # −6 dB amplitude SNR
ref = rng.choice(np.array([-1., 1.], dtype=np.float32), size=N).astype(np.complex64)
def frame():
"""One received frame: ref delayed by LAG chips + noise."""
sig = np.roll(ref, LAG) * np.float32(SNR)
re = rng.standard_normal(N).astype(np.float32)
im = rng.standard_normal(N).astype(np.float32)
return sig + (re + 1j * im).astype(np.complex64) * np.float32(1 / np.sqrt(2))
with Corr(ref, dwell=DWELL) as c:
output = None
for _ in range(DWELL):
output = c.execute(frame()) # None for first DWELL-1 calls, array on last
peak_lag = int(np.argmax(np.abs(output)))
print(f"peak at lag={peak_lag} (true={LAG})")
Detector — streaming CFAR detector¶
push(block) accepts arbitrary-length blocks and yields
(lag, peak_mag, noise_est, test_stat) for each dwell that fires:
from doppler.spectral import Detector
import numpy as np
rng = np.random.default_rng(42)
N, LAG, DWELL = 64, 17, 8
SNR = 10 ** (-6 / 20)
ref = rng.choice(np.array([-1., 1.], dtype=np.float32), size=N).astype(np.complex64)
def signal_block(n_dwells):
frames = []
for _ in range(n_dwells * DWELL):
re = rng.standard_normal(N).astype(np.float32)
im = rng.standard_normal(N).astype(np.float32)
noise = (re + 1j * im).astype(np.complex64) * np.float32(1 / np.sqrt(2))
frames.append(np.roll(ref, LAG) * np.float32(SNR) + noise)
return np.concatenate(frames)
det = Detector(ref, dwell=DWELL, noise_lo=LAG + 4, noise_hi=N - 1, threshold=5.0)
for lag, peak_mag, noise_est, test_stat in det.push(signal_block(4)):
print(f"detection lag={lag} stat={test_stat:.2f}")
detection lag=17 stat=6.58
detection lag=17 stat=8.04
detection lag=17 stat=7.11
detection lag=17 stat=7.90
Note
Actual test_stat values vary with the random seed; the lag is
deterministic for this RNG seed.
Corr2D — 2-D template matching¶
from doppler.spectral import Corr2D
import numpy as np
rng = np.random.default_rng(0)
NY, NX = 8, 8
ROW_SHIFT, COL_SHIFT = 3, 5
ref2d = rng.standard_normal((NY, NX)).astype(np.complex64)
# Signal: ref2d shifted by (ROW_SHIFT, COL_SHIFT)
sig2d = np.roll(np.roll(ref2d, ROW_SHIFT, axis=0), COL_SHIFT, axis=1)
with Corr2D(ref2d, dwell=1) as c:
out = c.execute(sig2d.ravel())
surf = np.abs(out).reshape(NY, NX)
peak_row, peak_col = np.unravel_index(surf.argmax(), (NY, NX))
print(f"peak at (row={peak_row}, col={peak_col}) (true=({ROW_SHIFT}, {COL_SHIFT}))")
Run the full demo: